TurboPlane – Robotic Complex for Flexible Automated Manufacturing
Introduction
TurboPlane is a robotic complex for concurrent and conveying multi-tool material processing. The robotic part of TurboPlane can simultaneously manipulate with such tools as water jet, laser, plasma torches, mechanical tools, marking equipment, adhesive dispensers, emission extractors, manipulators for transporting materials and assembly.
TurboPlane robotic complex was developed in cooperation with LST Laser & Strahl Technik GmbH.
The schematic view of TurboPlane system is shown in Figure 1.
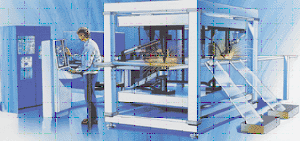
Figure 1: TurboPlane System
Configurability
Flexible industrial module TurboPlane as a basic robotic cell allows designing an industrial manufacturing systems or flexible industrial lines practically of any necessary complexity. It is possible to equip all movable modules by tools necessary for the work and reprogram them dynamically. TurboPlane gives excellent opportunities for cutting, welding, mechanical processing, marking and manipulating on several areas in working space. Many tools, manipulators and sensors can be controlled simultaneously. The system can be easily adjusted according the specific requirements. If necessary, integration of system can be easily achieved with rather simple handling and high flexibility of TurboPlane. Due to the very small time of reconfiguration, TurboPlane is ideally suited for just-in-time manufacturing purposes.
Linear Stepping Drives
TurboPlane was developed according to modular design principle. Various units are chosen to suit given requirements, enabling the system to be highly flexible tailored for specific tasks.
Every multi-coordinate unit is based on linear stepping drives and provides two-coordinate programmed movements, as linear stepping motors are preferable in the systems of coordinate movements with the numeric control. All movement tasks in multi-coordinate unit are performed without any cinematic constraints and mechanical transmissions. Linear stepping motors allow high quality surface processing by laser with high positioning accuracy for a wide class of systems.
Due to high accuracy, dynamics and control quality demands, a micro-stepping control mode of linear stepping motors was applied. This resulted in very high accuracy and dynamical properties of the system.
Control Level
Control system of TurboPlane was designed using up-to-date hardware solutions, such as digital signal processors (DSP) and transputers. DSP is applied for realtime processing and motion control. Interface functions and trajectory calculations are carried out by transputers. Core circuit in the system is internal network with 5 transputers and 1 PC-based server that allow interactive visual programming and configuration.
Control system of TurboPlane is splitted into three levels.
Linear Stepping Motor Control Level
The lowest level, a multi-coordinate unit control level, was implemented for realtime linear stepping motor control. It’s performed by universal SoftStep controller with two microprocessors: one DSP (ADSP-2100) and one transputer (T425).
Coordinate Unit Control Level
At the next level, simultaneous motion of units is coordinated in the uniform technological space to control peripheral equipment apart from equipment installed at the multi-coordinate units. This control unit contains two T800 transputers.
User Control Level
At last, we provide the ability for convenient control of the complex from personal computer, execution of various technological tasks, and monitoring of current state of the system. These tasks are performed using personal computer, which has a special hardware interface board to the transputer network.
Basic Implementation
TurboPlane basic implementation consists of four multi-coordinate units located on two parallel stators. The stators are mounted one above the other. There are three units at the upper stator and one at the lower. The following equipment is installed at the upper stator: 5-coordinate robot, manipulator, CO2-laser, YAG-laser with XY planar linear stepping motor, and a plotter and manipulator in one unit. The lower unit carries exhausting system, and it is used as transporter and collector of workpieces and manufactured parts.
SoftStep Controller
While developing the TurboPlane, two major problems were solved. The first problem was to provide movement with necessary accuracy, up to 5-10 micrometers, in open-loop control mode. The second problem was to coordinate simultaneous movements of several 2-coordinate linear stepping motors in realtime. These are the features of SoftStep Stepping Motor Controller.
Micro-Stepping Control
Taking into account all possible restrictions, a special algorithm for calibration of control currents was developed. Micro-stepping trajectory control was performed concurrently with realtime inductor position measurements at high frequency without special gauges. Measured and calculated positions were compared, and micro-stepping control contour corrected the winding currents in realtime to minimize positional error.
Collision Detection
Solving the second problem means the coordination of simultaneous movement of separate positioners in common workspace, and therefore, the development of efficient collision detection algorithms. It was solved in SoftStep Controller and in additional Transputer Controller, which coordinated the concurrent operation of linear stepping motors, provided the interface to personal computer, and implemented a set of additional service functions.
The goal of collision detection was to determine geometric contact automatically, which could happen or already happened. Distances between objects were reported with the aim of constructing feasible motion trajectory or keeping the movable objects away from obstacles.
Major problem to develop collision detection algorithm is its computational complexity, and therefore, development of efficient algorithm is vital for correct operation of system in realtime.
Conclusion
A system for parallel multi-tool conveying processing of materials TurboPlane was developed. This flexible industrial module as a basic robotic cell allows designing an industrial manufacturing systems or flexible industrial lines practically of any necessary complexity. A variety of tools, manipulators, and sensors can be controlled simultaneously by TurboPlane. The system can be easily adjusted according the specific requirements. Control system of TurboPlane allows user-friendly operation of any flexible industrial line; it enables very high accuracy of linear stepper motor control and collision detection.